近日,电气信息工程学院娄泰山副教授团队在人工智能领域顶级期刊《Expert Systems With Applications(ESWA)》上发表题为“A Hybrid Strategy-Based GJO Algorithm for Robot Path Planning”(一种基于用于机器人路径规划的混合策略GJO算法)的研究论文。
该论文研究了GJO应用于移动机器人路径规划时存在的收敛精度不高、易陷入局部最优问题。提出了基于混合策略的金豺优化算法(HGJO),该算法采用了递减非线性能量衰减策略以平衡全局和局部搜索能力。同时,将轮盘选择算法和莱维飞行策略引入到GJO算法的位置更新中,使算法避免在局部最优处陷入停滞。HGJO算法在23个基准函数和CEC2021基准函数上与其他最先进的优化算法进行了对比分析,同时应用于路径规划的消融实验中。3种不同环境中的30次独立实验结果表明,HGJO算法在得到的平均路径长度比原始算法分别提高0.21%、82.4%和7.9%。

图1 HGJO算法在不规则障碍物场景中的消融实验
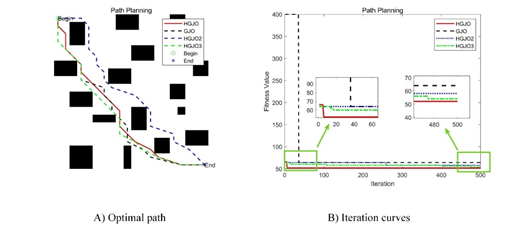
图2 HGJO算法在障碍物规则分布场景中的消融实验
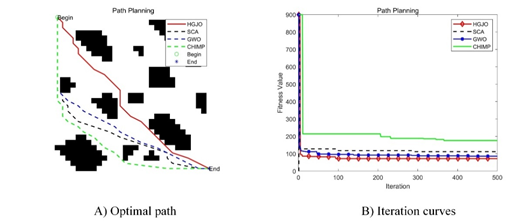
图3 HGJO算法在不规则障碍物大型场景中的对比实验
该论文以郑州轻工业大学为第一署名单位,娄泰山为第一作者,硕士研究生岳哲鹏为第二作者,焦玉召为通信作者。
《Expert Systems With Applications(ESWA)》创刊于1990年,由Elsevier主办,是计算机科学与人工智能领域的顶级期刊。该期刊重点专注于智能系统和专家系统的研究,并发表该领域的原创、创新和创造性成果。该期刊为中科院大类分区一区TOP期刊,2023年影响因子为8.5。
引用格式:Lou T, Yue Z, Jiao Y, et al. A hybrid strategy-based GJO algorithm for robot path planning[J]. Expert Systems with Applications. 2024, 238: 121975, Doi: 10.1016/j.eswa.2023.121975.
第一作者:娄泰山

郑州轻工业大学电气信息工程学院副教授,硕士生导师。主要从事导航制导与控制、无人系统、航迹规划和信息融合方法等方面的研究。截至目前发表学术论文60余篇,其中SCI/EI收录44篇,发明专利8项,出版教材1部,获省科技进步二等奖和三等奖各1项,省教育厅一等奖1项、二等奖2项。主持国基金1项,教育部产学研项目1项,省自然基金1项,省科技攻关3项,省高等学校重点科研项目2项,参与国家973计划深空探测项目的研究,以及多项国家自然科学基金的研究。
通信作者:焦玉召

郑州轻工业大学电气信息工程学院讲师,硕士生导师。发表SCI/EI收录16篇,授权发明专利3项,主编学术论著1部,获省科技进步二等奖1项,省教育厅一等奖1项,主持河南省自然基金1项,省科技攻关1项。从事非线性估计理论、航迹规划、目标跟踪和多传感器融合等方面的研究工作。